|
Jisu Lee I'm a candidate Ph.D at University of Hanyang in South Korea and studying Electrical Engineering. I'm passionate about exploration and exploitation challenges in Reinforcement Learning (RL), Meta-RL, and Causal-RL. I'm currently researching how to optimize Meta-RL with Causal Representation Learning in mobile robot scenarios. Email / Google Scholar / Twitter / Github / LinkedIn |

|
Publications |
|
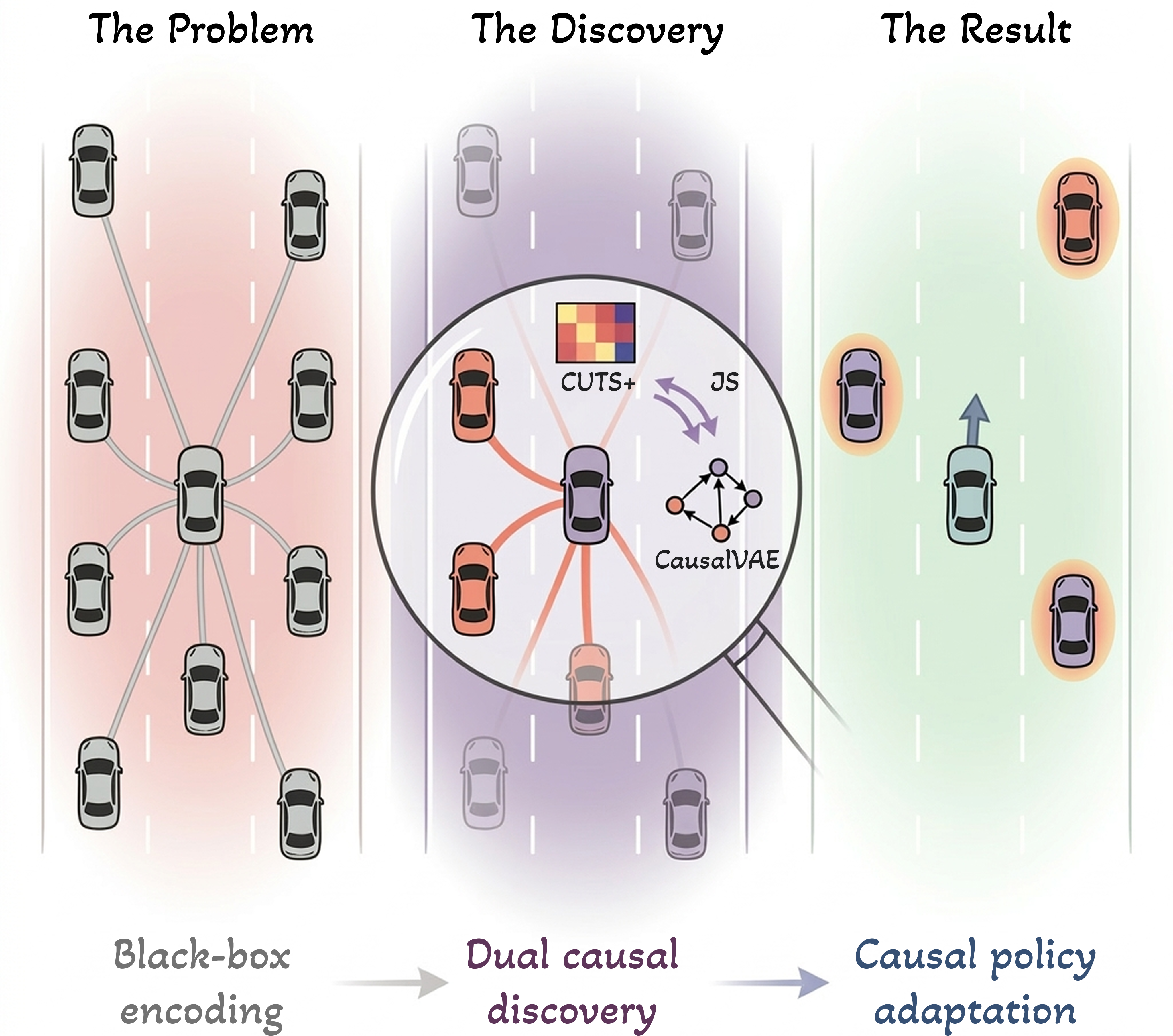
PRISM: Policy Regularization through Invariant Structural Modeling
Jisu Lee, Myoung Hoon Lee† and Jun Moon† preprint. project page |
|
|
GOME-NGU: visual navigation under sparse rewrd via Goal-Oriented Memory Encoder with Never Give Up
Jisu Lee, Jun Moon† IEEE Access, 2025 project page / video |
Miscellanea |
|
|
This project serves as a comprehensive guide for learning and implementing reinforcement learning (RL) algorithms using JAX. It is designed for both researchers and practitioners, providing structured tutorials and hands-on code implementations.
|
|
|
Paper Reviews is a curated platform offering in-depth reviews of cutting-edge research in AI, Machine Learning, and Robotics. Designed for both researchers and practitioners, it provides comprehensive insights, accessible explanations, and regular updates on influential publications.
|
Projects |

|
A causal meta-reinforcement learning environment built on highway-env, designed for research on context-based adaptation and causal inference in non-stationary traffic scenarios with a pure-JAX reimplementation for GPU-accelerated training. Supports 14 environment types with a unified do-calculus intervention API, declarative SCM engine, and counterfactual replay. |

|
A collaborative research project with KAUST laboratory focusing on autonomous drone control using reinforcement learning techniques for precise position control. Developed and implemented RL-based position control algorithms for quadrotor drones in complex 3D environments. |
|
|
We are proceeding with the NVIDIA Isaac-Sim Mobile Robot (Franka Research 3, Husky, QCar, Husky + Franka Research 3) unified platform to ease usage for beginner to master courses. We are developing a new user interface (UI) in the NVIDIA Isaac-Sim. |
|
Creating a semantic segmentation model for autonomous driving in the CARLA environment using a pre-trained model. Achieved real-time segmentation under diverse weather conditions. |
|
|
A research-driven project exploring advanced reinforcement learning techniques for autonomous racing, conducted using the Learn to Race simulation platform. Developed and evaluated various reinforcement learning algorithms, including Online RL, Offline RL, Transformer-based RL, State Space Models, and Meta-RL. |
Academic Service |
Conference Reviewer
Journal Reviewer
|
|
Updated April 2026. The source code of this website is owned by Jon Barron. |