|
Jisu Lee I'm a candidate Ph.D at University of Hanyang in South Korea and studying Electrical Engineering. I'm passionate about exploration and exploitation challenges in Reinforcement Learning (RL), Meta-RL, and Causal-RL. I'm currently researching how to optimize Meta-RL with Causal Representation Learning in mobile robot scenarios. |

|
Publications |
|
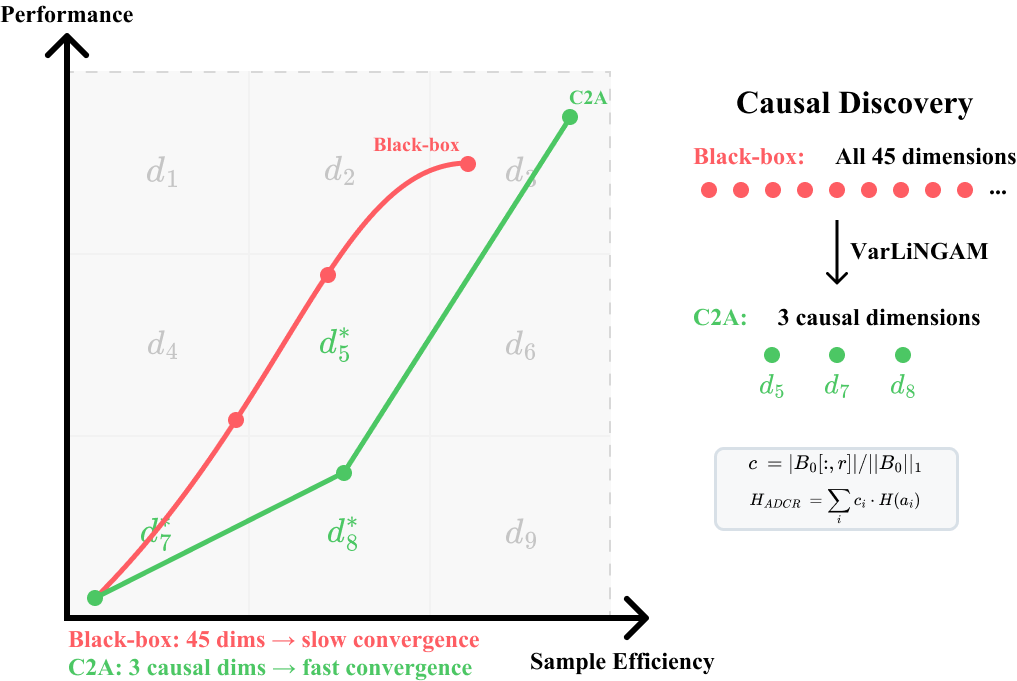
C2A: Causality-aware Context Adaptation
Jisu Lee, Myoung Hoon Lee and Jun Moon , submitted, 2025 project page / bibtex In this paper, we propose Causality-aware Context Adaptation (C2A), a meta-reinforcement learning framework that integrates temporal causal discovery with causal representation learning to enable sample-efficient and robust task adaptation in high-dimensional and causally sparse environments. |
|
|
GOME-NGU: visual navigation under sparse rewrd via Goal-Oriented Memory Encoder with Never Give Up
Jisu Lee, Jun Moon IEEE Access, 2025 project page / video / bibtex In this paper, we propose the Goal-Oriented Memory Encoder (GOME) with Never Give Up (NGU) algorithm to enhance visual navigation in sparse reward environments. |
Miscellanea |
|
|
This project serves as a comprehensive guide for learning and implementing reinforcement learning (RL) algorithms using JAX. It is designed for both researchers and practitioners, providing structured tutorials and hands-on code implementations.
|
|
|
Paper Reviews is a curated platform offering in-depth reviews of cutting-edge research in AI, Machine Learning, and Robotics. Designed for both researchers and practitioners, it provides comprehensive insights, accessible explanations, and regular updates on influential publications.
|
Projects |
|
|
We are proceeding with the NVIDIA Isaac-Sim Mobile Robot (Franka Research 3, Husky, QCar, Husky + Franka Research 3) unified platform to ease usage for beginner to master courses.
|
|
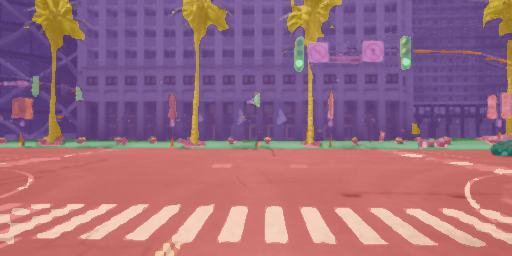
Creating a semantic segmentation model for autonomous driving in the CARLA environment using a pre-trained model.
|
|
|
A research-driven project exploring advanced reinforcement learning techniques for autonomous racing, conducted using the Learn to Race simulation platform.
|

|
A collaborative research project with KAUST laboratory focusing on autonomous drone control using reinforcement learning techniques for precise position control.
|
|
Updated March 2025. The source code of this website is owned by Jon Barron. |